变频器自己也可以玩转PID控制
通过变频器实现PID控制有两种情况:
一是变频器内置PID控制功能,给定信号通过变频器的键盘面板或端子输入,反馈信号反馈给变频器的控制端,在变频器内部进行PID调节以改变输出频率;
二是用外部的PID调节器将给定量与反馈量比较后输出给变频器加到控制端子作为控制信号。
总之,变频器的PID控制是与传感器元件构成的一个闭环控制系统,可以实现对被控制量的自动调节。
PID就是比例微分积分控制,是一种闭环控制。它将偏差比的比例、积分和微分通过线性组合构成控制量,对被控对象进行控制。
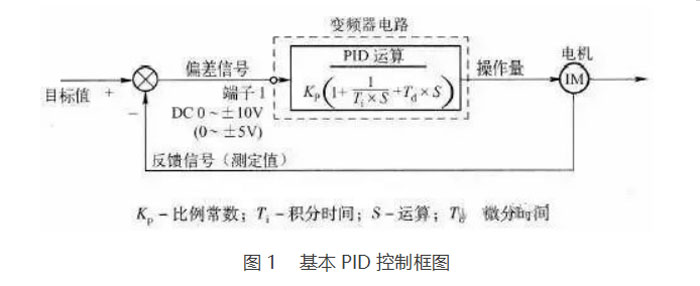
1基本PID控制框图
如图1所示为基本PID控制框图。
2 PID控制概述
在工艺生产和机械设备的自动控制中,一般PID操作不单独作用,即P(增益)、I(积分时间)、D(微分时间)不单独使用。常使用PI控制、PD控制和PID控制等组合控制方式。
1) PI控制
仅用P动作控制,不能完全消除偏差。为了消除残留偏差,一般采用增加I动作的P+I控制,即P和I运算之和。用PI控制时,能消除由改变目标值和经常的外来扰动等引起的偏差。但是I动作过强时,对快速变化偏差响应迟缓。对于有积分元件的负载系统,也可以单独使用P动作控制。
2) PD控制
当发生偏差时,很快会产生比单独D动作还要大的操作量,以抑制偏差的增加。当偏差减小,P动作的作用减小。若是控制对象含有积分元件负载的场合,仅P动作控制,有时由于此积分元件作用,系统会发生振荡。在该场合,为使P动作的振荡衰减和系统稳定,可用PD控制,即P和D运算之和。换言之,PD控制适用于过程本身没有制动作用的负载。
3) PID控制
PID控制是利用PI控制和PD控制的优点组合成的控制。PID运算是P、I和D三个运算的总和,可获得无偏差、精度高和系统稳定的控制过程。
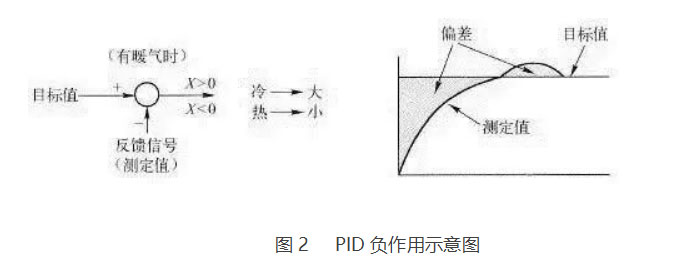
负作用:当偏差X(目标值一测定值)为正时,增加执行量(输出频率);如果偏差为负,则减小执行量。PID负作用如图2所示。
正作用:当偏差X(目标值-测定值)为负时,增加执行量(输出频率);如果偏差为正,则减小执行量。PID正作用如图3所示。

3反馈信号的接入方法
变频器反馈信号的接人方法有两种,即给定输入法和独立输入法。
给定输入法:变频器在使用PID功能时,将传感器测得的反馈信号直接接到给定信号端,其目标信号由键盘给定。
独立输入法:变频器专门配置了独立的反馈信号输入端,有的变频器还为传感器配置了电源,其目标值可以由键盘给定,也可以由指定输入端输入。
4 PID调节功能的预置
1)预置PID调节功能
预置的内容是变频器的PID调节功能是否有效。变频器的PID调节功能有效后,其加/减速过程将完全取决于由P、I、D数据决定的动态响应过程,而原来预置的“加速时间”和“减速时间”将不再起作用。
2)目标值的预置
PID调节的根本依据是反馈量与目标量之间进行比较的结果。因此,准确地预置目标值是很重要的,主要有以下两个方面。
面板输入式:只需通过键盘输入目标值即可。目标值通常是被测量实际大小与传感器量程之比的百分数。例如,空气压缩机要求的压力(目标压力)为6MPa,所用压力表的量程是0~10Mpa,则目标值为60%。
外部给定式:由外接电位器进行预置,调节较方便。
5变频器按P、I、D调节规律运行时的特点
变频器的输入频率只根据实际数值与目标值的比较结果进行调整,与被控量之间无对应关系。
变频器的输出频率始终处于调整状态,其数值常不稳定。
注:文章内容仅供学习、交流之用,文章版权归原作者所有。如有侵权,请联系删除。



